Overview of the Project
This series of posts details the essential components required for constructing and operating a 3-DOF planar direct-drive robotic manipulator. The project encompasses:
- Control Unit: A MATLAB project template for implementing and simulating control algorithms.
- Embedded Code: Software running on the data acquisition card.
- Circuit Design: The schematic and layout of the data acquisition card.
- CAD Model: A comprehensive model of the robotic design.
The complete project repository is available on GitHub: Roman3D Project Repo
Figure 1 illustrates the schematic of the experimental setup. The control algorithms, referred to as the Control Unit, are implemented in MATLAB/Simulink. The custom Data Acquisition Device collects encoder signals from the robot and transmits them to the Control Unit. It also converts control signals from the Control Unit into voltages, which are then amplified by the Amplificator before being sent to the 3-DOF Robotic Manipulator. These experiments are conducted in real-time with a sampling rate of up to 10 kHz.
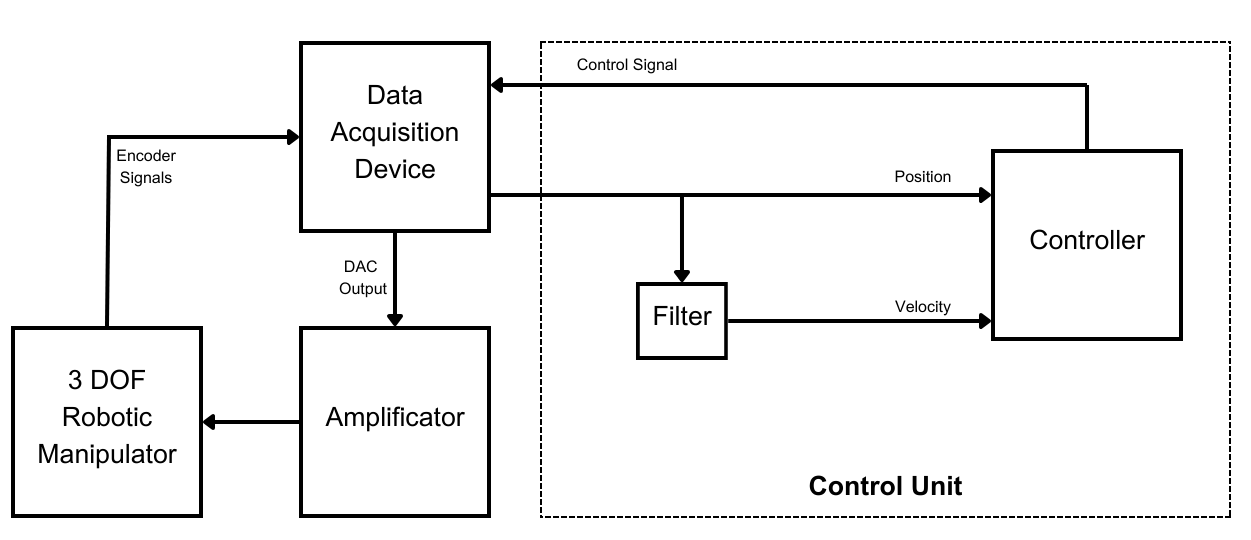
Figure 1: Experimental Setup Schematic
Documentation
For detailed documentation on each component, please refer to the following sections: